
Cable Robot Simulation
In the fall semester of 2020, my robotics group project was simulating a cable robot using MATLAB. The position of a cable robot is controlled by shortening and lengthening a series of cables attached to the robot on one end and a fixed base point on the other. We chose to control our simulated robot using inverse kinematics. Given a desired location, our MATLAB code calculated the required cable lengths to achieve this position.
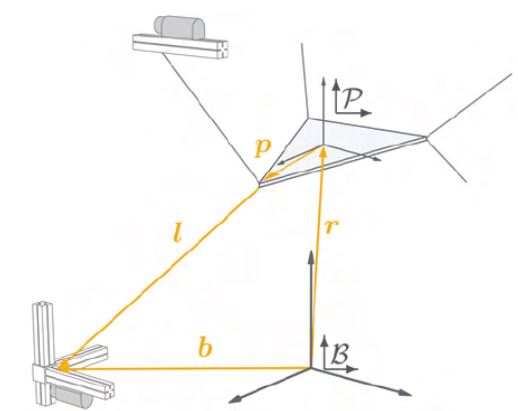
Diagram of cable robot kinematics (Bruckmann, Mikelsons, etc. 2008)
Unlike a robotic arm where the length of its joints limits its range of motion, a cable robot is limited by the tensions in its cables. For a cable robot to remain at a desired position, all forces and torques must balance. This becomes complicated because the cables must remain under a minimum level of tension to prevent sagging. Therefore, the major challenge in designing a cable robot is designing it to cover a large enough workspace i.e. large range of locations where a valid set of cable tensions exist.
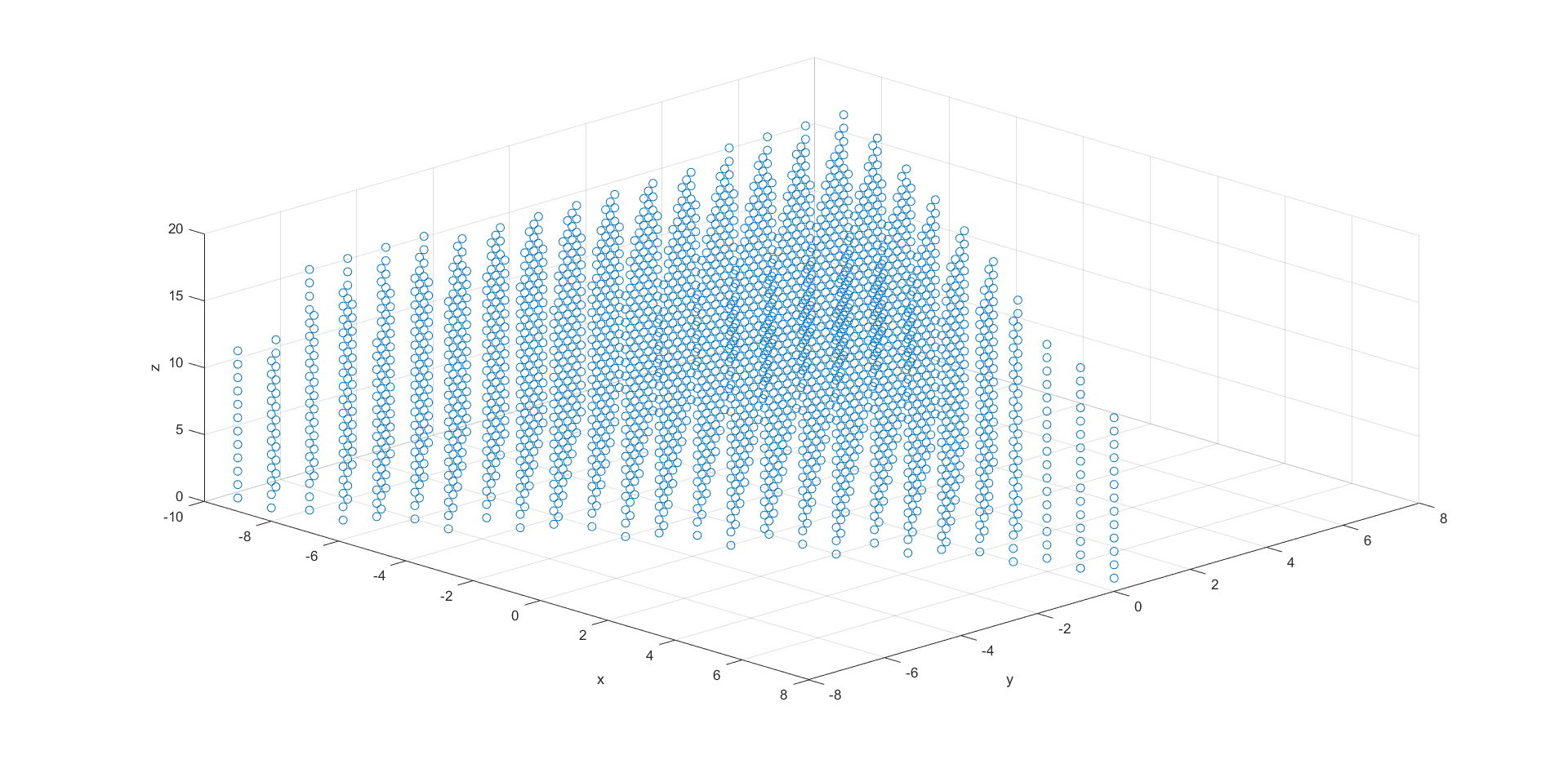
Workspace of an 8 cable robot
The project also incorporated computer vision as a means of guiding the position of the simulated cable robot. A checkered pattern was printed and attached to a clipboard which was tracked by a laptop webcam. Both the location and the orientation of the checker board were turned into translation and rotation in the simulation.